
- سیستم های پهپادی
- محصولات آسا









تماس بگیرید
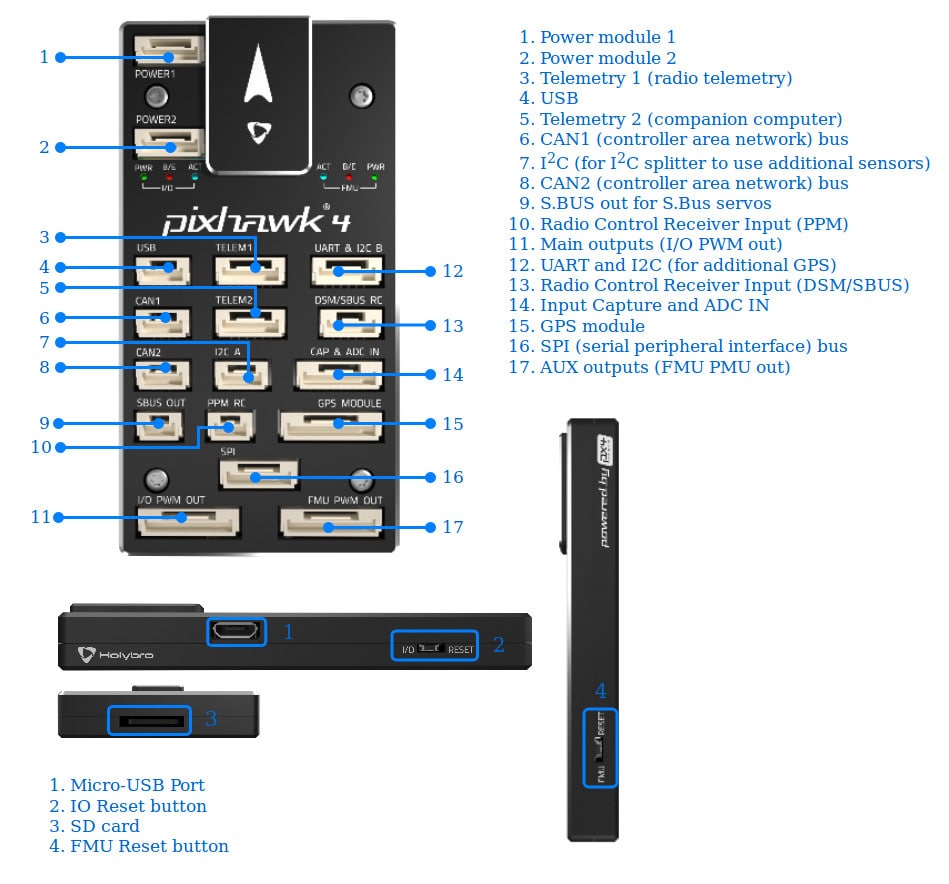
Pixhawk 4 ® یک اتوپایلوت پیشرفته است که با همکاری Holybro ® و تیم PX4 طراحی و ساخته شده است. این خلبان خودکار توسط تیمهای تعمیر و نگهداری و تست PX4 پشتیبانی میشود و برای توسعه دهندگان دانشگاهی و تجاری مناسب است.
عملکرد بالا و نویز کم در IMU روی برد که برای پایداری بیشتر طراحی شده از نقاط بارز این فلایت کنترل است. زمان انتقال اطلاعات از همه سنسورها به برد مرکزی فلایت کنترل کاهش یافته که همین امر باعث افزایش عملکرد در هنگام کار میشود.
این فلایت کنترلر دارای ابعاد نسبتا بزرگ (نسبت به فلایت کنترلرهای FPV) و پردازندههای قوی است. بنابراین برای پروژهها و پرندههایی کاربرد دارد که عملیات و الگوریتمهای پیچیدهای را پیاده سازی و اجرا میکنند.
اطلاعات بیشتر را میتوانید در برگه اطلاعات فنی Pixhawk 4 بیابید.
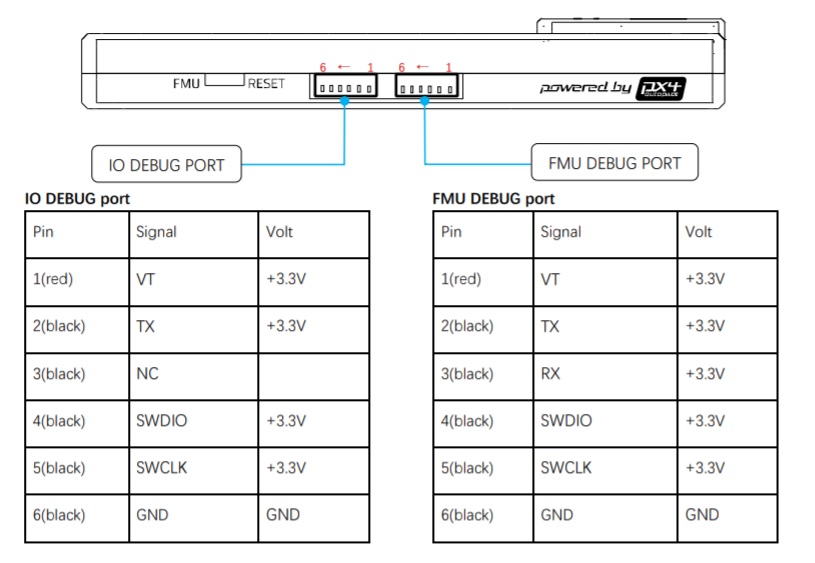
کنسول سیستم PX4 و رابط SWD روی پورت FMU Debug اجرا میشوند در حالی که کنسول I/O و رابط SWD از طریق پورت عیب یابی I/O قابل دسترسی هستند. برای دسترسی به این پورت ها، کاربر باید پوشش اتوپایلوت Pixhawk 4 را جدا کند.
هر نوع مولتی روتور / هواپیما / مریخ نورد یا قایق که بتواند با سرووهای معمولی RC یا سرووهای Futaba S-Bus کنترل شود را پشتیبانی میکند.
این محصول در دو نوع Pixhawk 4 و Combo Pixhawk 4 عرضه شده است که بسته محصول اتوپایلوت کمبو همراه با GPS Neo-M8N شامل موارد زیر میباشد:
| وزن |
15.8g |
|---|---|
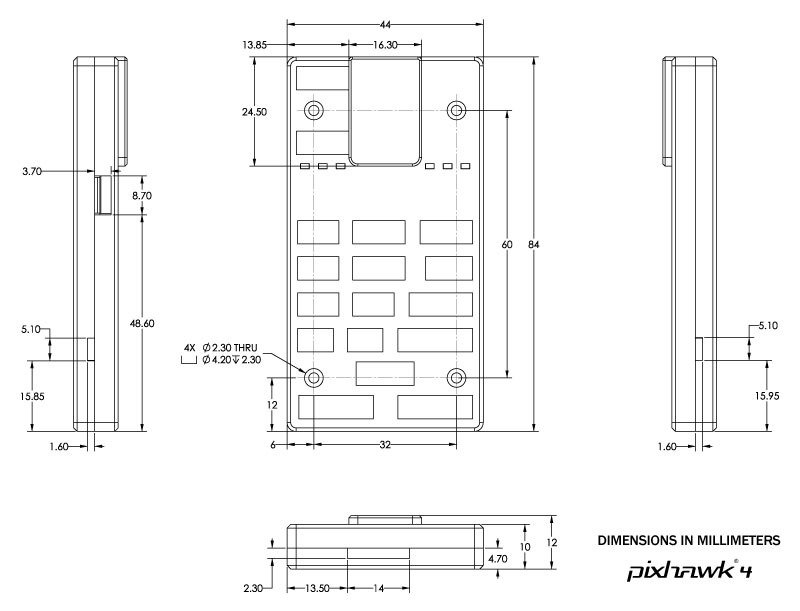
| ابعاد |
44x84x12mm |
| اپلیکیشن تلفن همراه |
PX4 |
| برند |

پهپاد بخرید و رایگان دریافت کنید!

با خیال راحت محصول را استفاده کنید!

کارشناسان ما آماده پاسخگویی هستند!

هر طور راحتید خرید کنید!

















دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.