
- سیستم های پهپادی
- محصولات آسا
-min")
 2-min")
 5-min")
 4-min")





تماس بگیرید
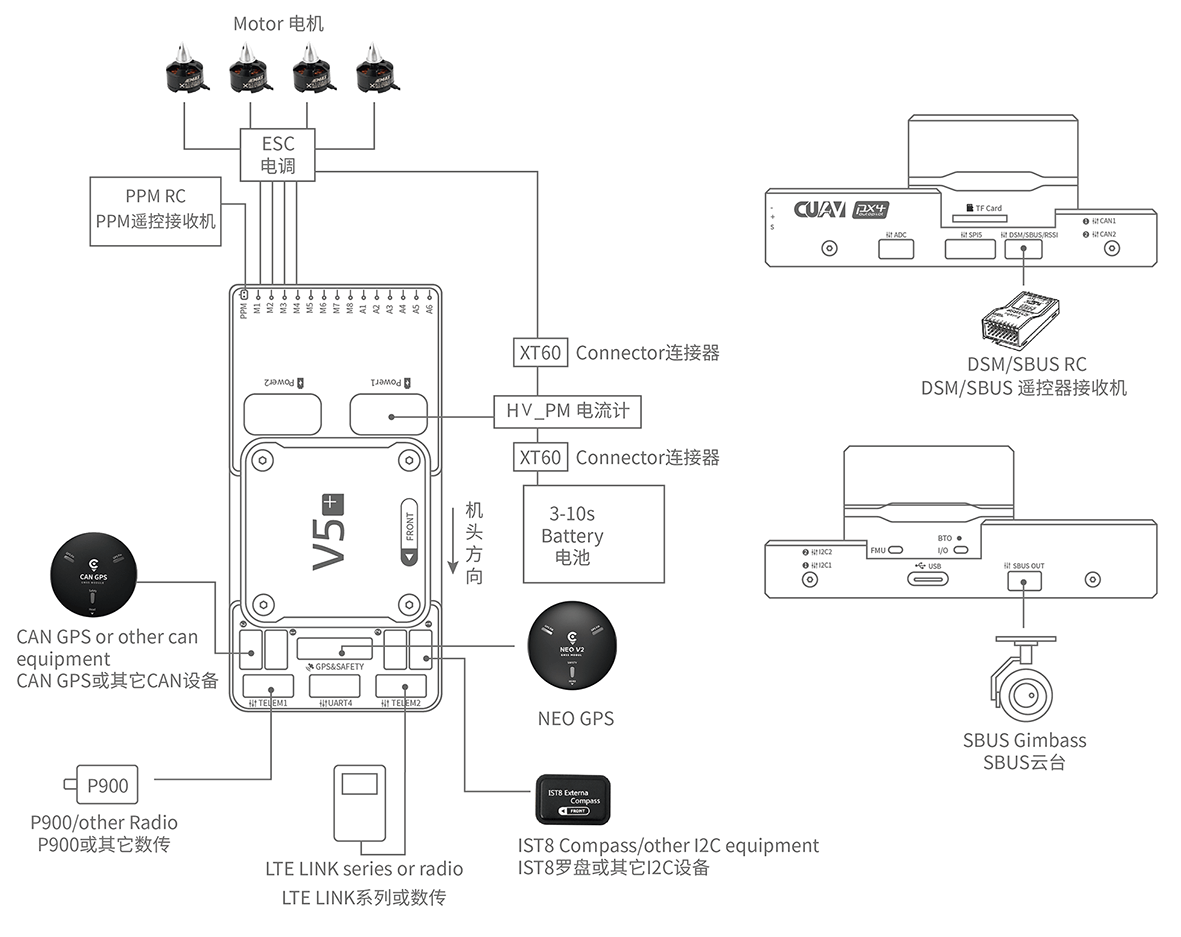
خلبان خودکار +Pixhawk V5 یک اتوپایلوت پیشرفته است که توسط CUAV® و با همکاری تیم PX4 طراحی شده است. این خلبان خودکار نه تنها برای یکپارچه سازی سیستمهای تجاری توصیه میشود، بلکه برای تحقیقات آکادمیک و هر کاربرد دیگری نیز مناسب است.

برخی از ویژگی های اصلی +pixhawk V5 عبارتند از:
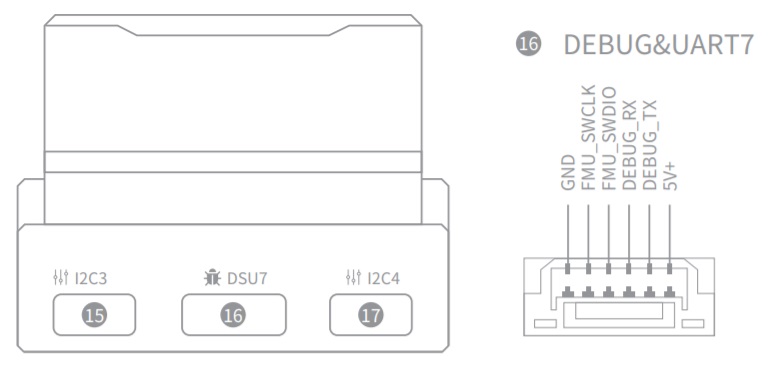
کنسول سیستم PX4 و رابط SWD روی پورت عیب یابی FMU (DSU7) کار میکنند. برد رابط عیب یابی I/O ندارد.
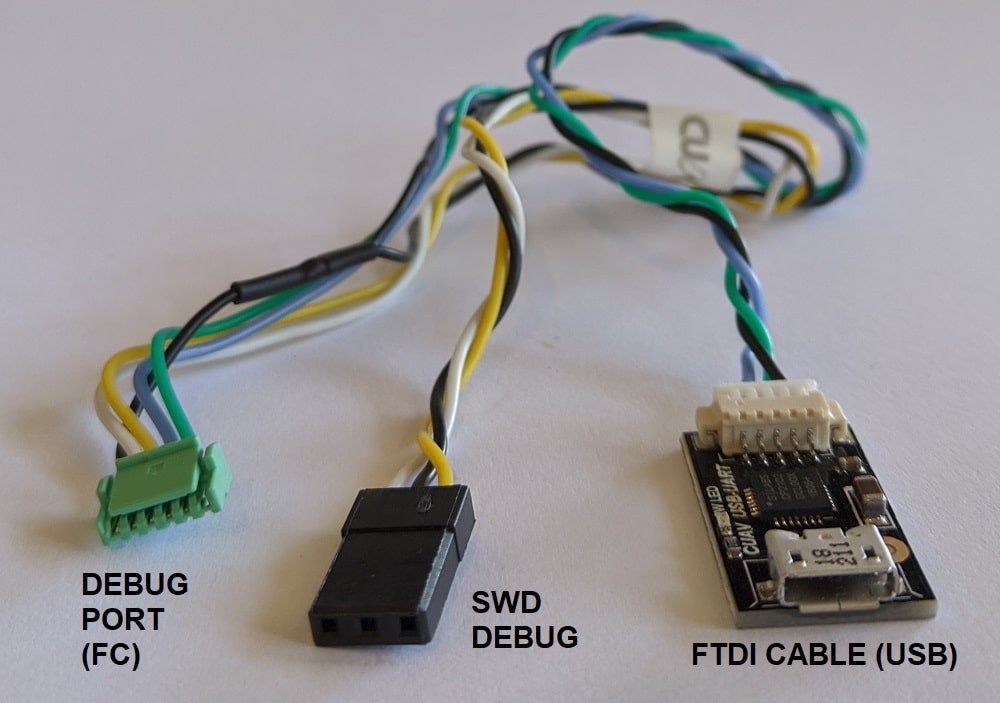
بسته محصول شامل یک کابل دیباگ است که میتواند به پورت DSU7 متصل شود. این کابل، FTDI را از اتصال سیستم PX4 به پورت USB کامپیوتر و پین های SWD مورد استفاده برای عیب یابی SWD/JTAG جدا میکند. کابل عیب یابی ارائه شده به پین Vref پورت SWD متصل نمیشود.
+pixhawk V5 از هر نوع مولتی روتور / هواپیما / مریخ نورد یا قایق که بتواند با سرووهای معمولی RC یا سرووهای Futaba S-Bus کنترل شود، پشتیبانی میکند.
CUAV از طراحیهای متفاوتی برای ساخت +pixhawk V5 استفاده کرده و با برخی از سخت افزارها ناسازگار است که در زیر توضیح داده خواهد شد.
GPS با دستگاههای دیگر سازگار نیست. GPS Neo v2.0 توصیه شده برای استفاده با +CUAV V5 و CUAV V5 nano با سایر کنترلرهای پرواز Pixhawk سازگار نیست.
| وزن |
90g |
|---|---|
| ابعاد |
85.5*42*33mm |
| برند |

پهپاد بخرید و رایگان دریافت کنید!

با خیال راحت محصول را استفاده کنید!

کارشناسان ما آماده پاسخگویی هستند!

هر طور راحتید خرید کنید!

















دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.